Delta Robot Arm
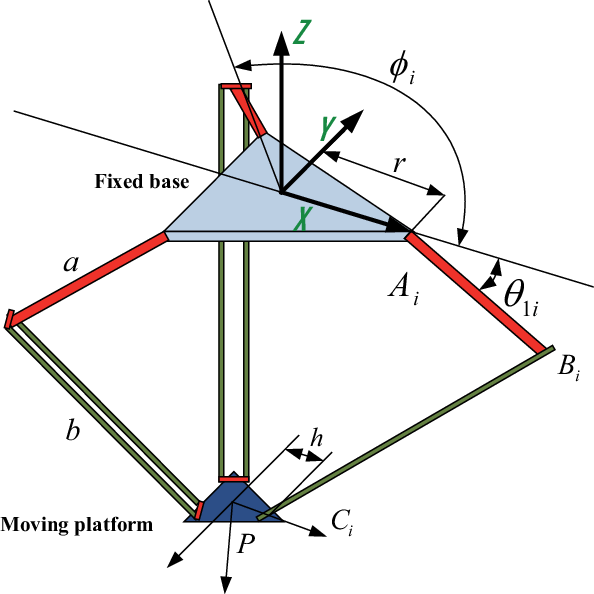
This is one of my current projects, and I will update this page as I make progress. I am designing a delta style robot arm, that uses three motors in a triangle formation to manipulate an end effector in three dimensions. To accomplish this goal, I am combining my prototyping, programming, and engineering expertise to create an arm that can accurately move to any point in space within its reach. The arm will use inverse kinematics equations that I calculated to allow it to move on its own to any given point, and all that needs to be inputted are coordinates in space.